Erste Schritte - Tutorial
Voraussetzungen
 Siehe auch: Erste Schritte
Siehe auch: Erste Schritte
Die hier verzeichneten Tutorials nutzen das aTeVaL-Board aus dem Starterkit-Luna von eHaJo . Sie können natürlich auch auf anderen Boards oder einem Steckbrett ausgeführt werden. Die notwendigen Schritte vom erstellen des Programms bis zur Übertragung auf den Controller sind ähnlich. Abweichende Belegungen von z.B. LEDs müssen dann entsprechend angepasst werden.
Der Aufbau bzw. die Lötanleitung wird im aTeVaL-Board Wiki ausführlich erläutert.
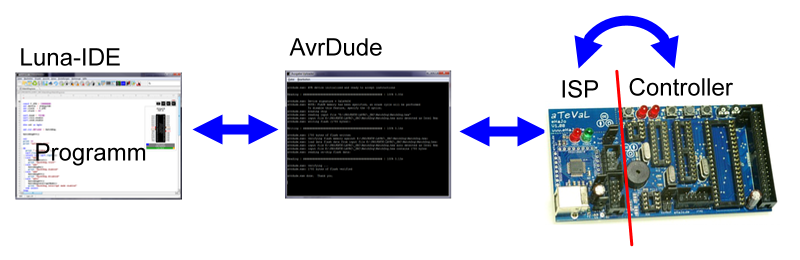
Auf dem aTeVaL befindet sich ein ISP, mit dem man das fertig kompilierte Programm auf den Atmel-Controller übertragen kann. Das aTeVaL unterstützt hierbei das originale Atmel-Studio oder auch das Programmieren mit AvrDude. Die Luna-IDE nutzt AvrDude als Übertragungssoftware, daher muss das aTeVaL vorher auf den "AvrDude"-Modus einmalig umgestellt werden.
Nach dem Zusammenlöten
Nach dem zusammenlöten des aTeVaL schließt man es per USB an den Rechner und wechselt in den AvrDude-Modus wie unter obigem Link beschrieben. Bei z.B. Windows7/8/Vista werden die Treiber automatisch installiert und es existiert ein neues Gerät namens „AVRISP mkII“. Zur Kommunikation über die USB-Schnittstelle wird „libusb“ benötigt. Am Beispiel für Windows die Installationabfolge:
- libusb-win herunterladen, Archiv auspacken Download-Links unter Programmer/Uploader
- in den Ordner bin/x86/ wechseln
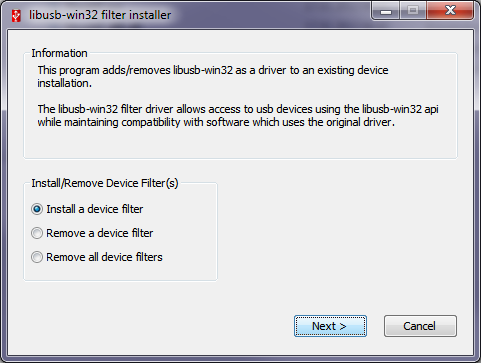
- Programm install-filter-win.exe ausführen
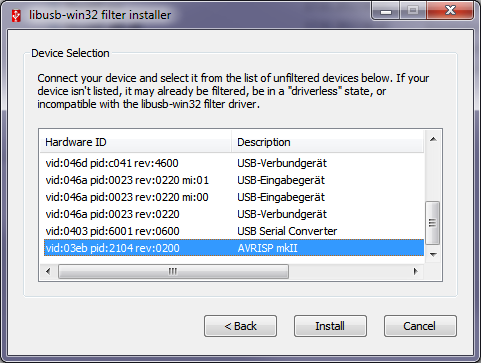
- Treiber für „AVRISP mkII“ installieren:
In der Luna-IDE stellen wir unter Einstellungen/Uploader die Schnittstelle „usb“, sowie den Programmer „AVRISPMKII - Atmel AVR ISP mkII“ ein. Anschließend ist alles bereit um über die Luna-IDE auf den Mikrocontroller zuzugreifen. Für die untenstehenden Beispiele/Tutorials verwenden wir den Controller „Atmega328p“ aus dem Starterkit.
Kommunikation
Tutorials
Programmbeispiele
Folgende Programmbeispiele sind analog zu den C-Beispielen im aTeVaL-Wiki.
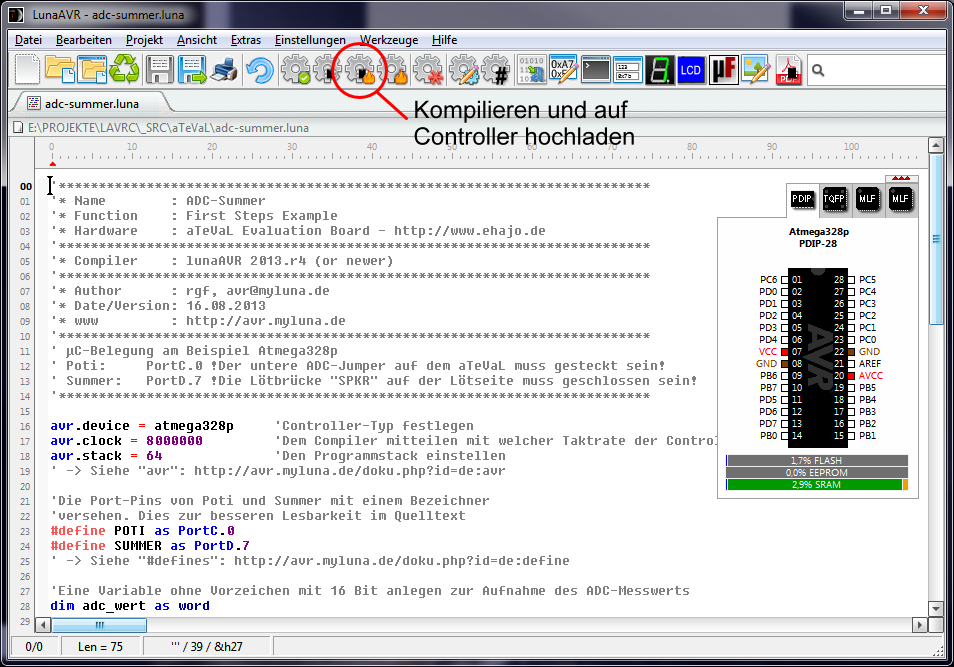
Nach dem einladen eines der Beispiele kann es mit dem Knopf oder dem Menüpunkt „Kompilieren und auf Controller hochladen“ kompiliert und auf den Mikrocontroller hochgeladen werden. Es wird im Anschluss direkt auf dem Controller ausgeführt.